
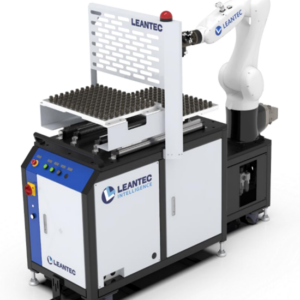
| Mã bộ xe đẩy Robot | LXC100-917Y | LXC100-1206R | LXC100-1468C |
| Mã Robot | LA917-6-Y | LA1206-10-R | LA1468-10-C |
| Tải trọng Robot (kg) | 6 | 10 | 10 |
| Tầm với Robot (mm) | 917 | 1206 | 1468 |
| Độ chính xác lặp lại Robot (mm) | ±0.03 | ±0.05 | ±0.08 |
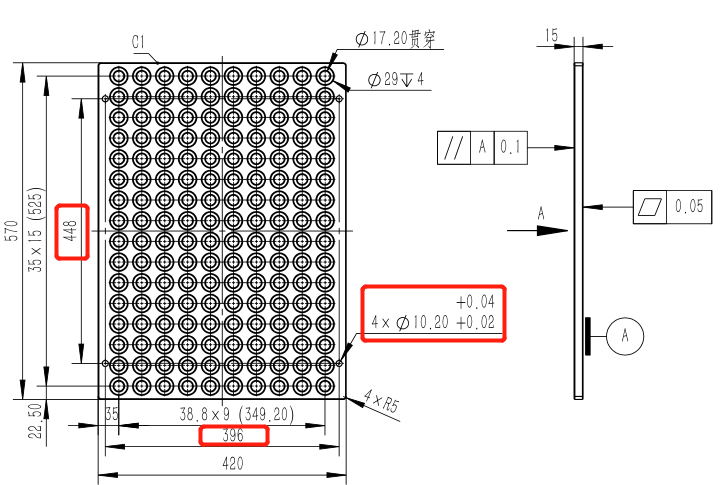
| Kích thước khay (mm) | 570×420 | 570×420 | 1000×600 |
| Tải trọng khay (kg) | 60 | 60 | 60 |
| Cấp bảo vệ | IP54 | IP54 | IP54 |
| Bộ phận tác động cuối | Tùy chọn | Tùy chọn | Tùy chọn |
| Kích thước (mm) AxBxC | 1700x600x1550 | 1700x600x1550 | 2500x1100x1550 |
 |
 |
| Kích thước | Phạm vi hoạt động |
 |
|
| Kích thước khay | |
|
|
 |
| Kích thước mặt bích/chân đế | Biểu đồ tải trọng |
| Mã Robot | R41-LA1600-6H-C | R41-LA2000-6H-C | |
| Số trục | 6 | 6 | |
| Tải trọng (kg) | 6 | 6 | |
| Tầm với lớn nhất (mm) | 1600 | 2000 | |
| Độ chính xác lặp lại (mm) | ±0.08 | ±0.08 | |
| Phạm vi các khớp (°) | J1 | ±170 | ±170 |
| J2 | +140/-90 | +150/-100 | |
| J3 | +85/-135 | +85/-135 | |
| J4 | ±180 | ±180 | |
| J5 | ±130 | ±130 | |
| J6 | ±350 | ±350 | |
| Công suất động cơ (kw) | J1 | 1.5 | 1.5 |
| J2 | 1.5 | 2.0 | |
| J3 | 0.75 | 1.5 | |
| J4 | 0.2 | 0.4 | |
| J5 | 0.2 | 0.2 | |
| J6 | 0.2 | 0.2 | |
| Trọng lượng Robot (kg) | 200 | 323 | |
| Kiểu lắp đặt | Gắn sàn, Treo ngược, Gắn nghiêng | Gắn sàn, Treo ngược, Gắn nghiêng | |
| Cấp bảo vệ | IP54 | IP54 | |
| Điều kiện hoạt động | Nhiệt độ môi trường: 0~40℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
Nhiệt độ môi trường: 0~40℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
|

|

|
| Phạm vi hoạt động | Kích thước mặt bích/chân đế |
Đặc trưng
| Mã Robot | R41-LA1600-6H-C | R41-LA2000-6H-C | |
| Số trục | 6 | 6 | |
| Tải trọng (kg) | 6 | 6 | |
| Tầm với lớn nhất (mm) | 1600 | 2000 | |
| Độ chính xác lặp lại (mm) | ±0.08 | ±0.08 | |
| Phạm vi hoạt động () | J1 | ±170 | ±170 |
| J2 | +140/-90 | +150/-100 | |
| J3 | +85/-135 | +85/-135 | |
| J4 | ±180 | ±180 | |
| J5 | ±130 | ±130 | |
| J6 | ±350 | ±350 | |
| Công suất động cơ (kw) | J1 | 1.5 | 1.5 |
| J2 | 1.5 | 2.0 | |
| J3 | 0.75 | 1.5 | |
| J4 | 0.2 | 0.4 | |
| J5 | 0.2 | 0.2 | |
| J6 | 0.2 | 0.2 | |
| Trọng lượng Robot (kg) | 200 | 323 | |
| Kiểu lắp đặt | Gắn sàn, Treo ngược, Gắn nghiêng | Gắn sàn, Treo ngược, Gắn nghiêng | |
| Cấp bảo vệ | IP54 | IP54 | |
| Điều kiện hoạt động | Nhiệt độ môi trường: 0~40℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
Nhiệt độ môi trường: 0~40℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
|

|

|
| Phạm vi hoạt động | Kích thước mặt bích/chân đế |
Đặc trưng
| Mã bộ xe đẩy Robot | LXC100-917Y | LXC100-1206R | LXC100-1468C |
| Mã Robot | LA917-6-Y | LA1206-10-R | LA1468-10-C |
| Tải trọng Robot (kg) | 6 | 10 | 10 |
| Tầm với Robot (mm) | 917 | 1206 | 1468 |
| Độ chính xác lặp lại Robot (mm) | ±0.03 | ±0.05 | ±0.08 |
| Kích thước khay (mm) | 570×420 | 570×420 | 1000×600 |
| Tải trọng khay (kg) | 60 | 60 | 60 |
| Cấp bảo vệ | IP54 | IP54 | IP54 |
| Bộ phận tác động cuối | Tùy chọn | Tùy chọn | Tùy chọn |
| Kích thước (mm) AxBxC | 1700x600x1550 | 1700x600x1550 | 2500x1100x1550 |
 |
 |
| Kích thước | Phạm vi hoạt động |
 |
|
| Kích thước khay | |

|
 |
| Kích thước mặt bích/chân đế | Biểu đồ tải trọng |
| Line item | Stepper motor controller | ||
| Model | HC-8S | ||
| -S | -E | ||
| Number of axes | Standard | 5 | |
| Option | – | ||
| Maximum simultaneous number | 5 | ||
| Axis group | Main system axis group | 4 | |
| Main system + PLC axis group | 4 | ||
| MST channel | 4 | ||
| Spindle number | 6 | ||
| Hardware | Servo Control | Step | |
| RAM | 256MB | ||
| I / O standard | 16/4 | ||
| RIO option | – | ||
| DA | – | ||
| Screen | Full plane | Second half | |
| 8 “touch panel | – | ||
| DiskC | Flash 256MB | ||
| DiskA | Flash 256MB | ||
| Front interface | USB | 0 | |
| Rear interface | RJ-45 | 2 | |
| SRI | 2 | ||
| RS-485 | 1 | ||
| USB | 2 | ||
| KB | 0 | ||
| H / K | 0 | ||
| 5V output | 0 | ||
| VGA | – | ||
| System | WinCE | ||
| Standard function | 1. Support G / M code
2. Support eHMI customization 3. Support five-axis linkage 4. Not support tool-related functions 5. Support spindle |
||
| Optional function | 1. Vision
2. Remote monitoring |
||
| Accessory hardware | – | ||
| Option-4 | Enable Plugin Function | O | |
| Option-5 | Enable PC-CNC Application | O | |
| Option-11 | High Precision Contouring Control Mode | Δ | |
| Option-12 | Rotation Tool Center Point Control (RTCP) | Δ | |
| Option-13 | Feature Coordinate System | Δ | |
| Option-14 | Parameter learning function | ||
| Option-15 | Tapping Learning | ||
| Option-16 | Syntec Vision | Δ | |
| Option-17 | Commercial Vision Software | Δ | |
| Option-18 | CAD / CAM function CAD / CAM | Δ | |
| Option-19 | 3D Arc Interpolation | Δ | |
| Option-20 | All in one Pick and Place (All in one) | ||
| Option-21 | Four Axis Robot | Δ | |
| Option-22 | Five-Axis Robot | Δ | |
| Option-23 | Six-Axis Robot | Δ | |
| Option-24 | Gantry Robot | Δ | |
| Option-25 | High-speed pre-resolving function Advanced Look-Ahead | Δ | |
| Option-26 | Smooth Tool Center Point Control (STCP) | ||
| Option-27 | Multiple mechanisms for five-axis | ||
| Option-28 | The 2nd coordinate supports five-axis function | ||
| Option-29 | Four-axis Rotation Tool Center Point Control (4AXRTCP) | Δ | |
| Option-30 | Five-axis Synchronized Motion Control | ||
| Option-31 | High Speed Chamfering Contour Control | ||
| Option-32 | ROT Servo Turret | ||
| Option-34 | Wood Software | ||
| Option-35 | 3D Laser Scanning | ||
| Option-36 | Wood Built-In CAM Function | ||
| Option-37 | Wood Build-In CAM Function | ||
| Option-38 | Right-angle multi-arm function Multi-Gantry Robot | ||
| Option-39 | 2D simultaneous marking | ||
| Option-40 | Expand the number of T codes to the maximum limit | ||
O Standard function
△ Optional function
– Not available function
| Model | Item | 6GA-E | 21GA-E | 7GA | 22GA |
| Axis control | Standard. Axis | 4 | 6 | 4 | 6 |
| Max. Axis (Optional) | 6 | 18 | 6 | 18 | |
| Max. Spindle | 6 | 6 | 6 | 10 | |
| Axis group + PLC axis group | 2 | 4 | 2 | 4 | |
| Max. Simultaneous Axis Control | Single axis group | 4 | 4 | 4 | 4 |
| Hardware | Servo control | ECAT/RTEX/M3 | ECAT/RTEX/M3 | ECAT/RTEX/M3 | ECAT/RTEX/M3 |
| Standard I/O | 32/32 | 32/32 | 64/64 (RIO) | 64/64 (RIO) | |
| Optional I/O | 96/96 | 96/96 | 128/128 | 128/128 | |
| DA | 2 | 2 | – | – | |
| Monitor (Inch) | 8″ | 10.4″ | 8″ | 10.4″ | |
| DiskC | 4GB | 4GB | 4GB | 4GB | |
| DiskA | 4GB | 4GB | 4GB | 4GB | |
| Front interface | CF Card | – | – | – | – |
| USB | 2 | 2 | 2 | 2 | |
| Rear interface | RJ-45 | O | O | O | O |
| VGA | – | – | – | – | |
| RS-232 | – | – | – | – | |
| RS-422 | – | – | – | – | |
| RS-485 | O | O | O | O | |
| USB | – | – | – | – | |
| PS/2 | – | – | – | – | |
| KB | O | O | O | O | |
| HK | O | O | O | O | |
| 5V | O | O | O | O | |
| SRI | O | O | O | O | |
| Normal/HPCC | 1stCoord: 600/600 2ndCoord: 600/600 After opening OP31: 1stCoord: 1200/1200 2ndCoord: 1000/1000 |
1stCoord: 4000/4000 2~4Coord: 1000/1000 |
|||
| Standard features | 1. G5.1 2. Simultaneous tapping 3. Fast transmission and fast attack 4. Tapping and rapid retraction 5. Multi-spindle simultaneous tapping 6. Axis exchange function 7. Overlapping 9. Single axis group five-axis simultaneous motion function |
2. Simultaneous tapping 3. Fast transmission and fast attack 4. Tapping and rapid retraction 6. Axis exchange function 7. Overlapping 10. G120.1 multiple sets of processing conditions |
2. Simultaneous tapping 3. Fast transfer and fast attack 4. Tapping and quick retraction 6. Axis exchange function 7. Overlapping 10. G120.1 multiple sets of processing conditions 11. G81.1 Chopping |
||
| Option | Option-4 Enable Plugin Function | O | O | ||
| Option-11 High Precision Contour Control (HPCC) | O | O | |||
| Option-12 Rotation Tool Center Point (RTCP) | |||||
| Option-13 Feature Coordinate System | Δ | ||||
| Option-14 Parameter learning function | Δ | ||||
| Option-15 Tapping Learning | Δ | ||||
| Option-16Syntec Vision | Δ | Δ | |||
| Option-17 Commercial Vision Software | Δ | Δ | |||
| Option-18 CAD/CAM | Δ | Δ | |||
| Option-19 3D Arc Interpolation | Δ | ||||
| Option-20 Pick and Place (All in one) | Δ | Δ | |||
| Option-21 Four Axis Robot | Δ | Δ | |||
| Option-22 Five Axis Robot | Δ | Δ | |||
| Option-23 Six Axis Robot | Δ | Δ | |||
| Option-24 Gantry Robot | Δ | Δ | |||
| Option-25 Advanced Look-Ahead | Δ | ||||
| Option-26 Smooth Tool Center Point(STCP) | |||||
| Option-27 Multiple mechanisms for five-axis | Δ | ||||
| Option-28 The 2nd coordinate supports feature coordinate system | Δ | ||||
| Option-29 Four-axis Rotation Tool Center Point Control (4AXRTCP) | |||||
| Option-31 High Speed Chamfering Contour Control | O | O | |||
| Option-32 ROT Servo Turret | Δ | Δ | |||
| Option-34 Wood Software | Δ | ||||
| Option-35 3D Laser Scanning | |||||
| Option-36 Wood Built-In CAM Function |
O Standard function
△ Optional function
– Not available function
| Category | Items | Five -Axis | |||||
| 200MA-5 | 200MB-5 | 210MA-H5 | 210MB-H5 | 220MA-5 | 220MB-5 | ||
| Product Specification | Max. PLC Controlled Paths | 4 | 4 | 4 | |||
| Max. PLC Controlled Paths | 3 | 3 | 3 | ||||
| Standard Axis | 8 | 12 | 8 | 12 | 8 | 12 | |
| Max. Axis (Optional) | 9 | 16 | 9 | 16 | 9 | 16 | |
| Max. Spindle | 6 | 6 | 6 | ||||
| Max. Simultaneous Axis Control | 5 | 5 | 5 | 5 | |||
| Min. Control (mm) | 0,0001 | 0,0001 | 0,0001 | ||||
| Max. number of program coordinate | 100 | 100 | 100 | ||||
| Max. Number of Table Tools | 96 | 96 | 96 | ||||
| Multi-Channel Function Group | 4 | 4 | 4 | ||||
| Look-Ahead Blocks no. | 2000 | 2000 | 2000 | ||||
| Block Processing timT | 4000 | 4000 | 4000 | ||||
| Hardware Specifications | Storage DISKA (MB) | 256 | 4096 | 4096 | |||
| Standard I/O | 32/32 | 32/32 | 32/32 | ||||
| Optional I/O | 96/96 | 96/96 | 128/128 | ||||
| DA | 1 | 2 | ─ | ||||
| Monitor (Inch) | 10.4/15 | 10,4 | 10.4/15 | ||||
| CF Card | 1 | ─ | ─ | ||||
| CF Card | 2 | 2 | 2 | ||||
| USB | 2 | ─ | ─ | ||||
| RJ-45 | 2 | 1 | 2 | ||||
| VGA Output | 1 | 1*** | ─ | ||||
| PS/2 | 1 | ─ | ─ | ||||
| RS-232 | 1 | ─ | ─ | ||||
| RS-422 | 1 | ─ | ─ | ||||
| RS-485 | 1 | 1 | 1 | ||||
| USB | 2 | ─ | 2 | ||||
| SRI | ─ | 1 | 1 | ||||
| Servo Control | Pulse Train (A/B Phase) | ─ | ─ | ─ | |||
| Pulse Train (CW/CCW) | ─ | ─ | ─ | ||||
| Mechatrolink II | O | O | ─ | ||||
| Mechatrolink III | ─ | O | O | ||||
| EtherCAT | ─ | O | O | ||||
| RTEX | ─ | O | O | ||||
| Compensation | Backlash Compensation | O | O | O | |||
| Pitch Error Compensation | O | O | O | ||||
| Angular Error Compensation | O | O | O | ||||
| Temperature Error Compensation | O | O | O | ||||
| 2 Dimension Error Compensation | O | O | O | ||||
| Operation | MPG Simulation | O | O | O | |||
| Dry Run | O | O | O | ||||
| Optional Stop | O | O | O | ||||
| Single Block | O | O | O | ||||
| Virtual MPG | O | O | O | ||||
| Restart at Feedhold | O | O | O | ||||
| Restart at Break Point | O | O | O | ||||
| Tool Return | O | O | O | ||||
| Fixture Offsets | O | O | O | ||||
| MPG Offsets | O | O | O | ||||
| Programming | Optional Skip | O | O | O | |||
| B-Stop | O | O | O | ||||
| Absolute Zero Point Coordinate (G92/G92.1) | O | O | O | ||||
| Interrupt Macro (M96/M97) | O | O | O | ||||
| M198 call Subroutines | O | O | O | ||||
| Expandable G Code | O | O | O | ||||
| HSHP | Constant Jerk Control | O | O | O | |||
| Multiblocks S-curve motion plan | O | O | O | ||||
| Auto declaration in Corner | O | O | O | ||||
| Speed Limit for Round Radius | O | O | O | ||||
| Multiple Sets of HSHP Parameters | O | O | O | ||||
| Quick Parameter Setup | O | O | O | ||||
| SPA Feature | O | O | O | ||||
| Virtual Radius Funciton (for Rotary Axis) | O | O | O | ||||
| HSHP Control Mode I (G05.1 Q1) | O | O | O | ||||
| HSHP Control Mode II (G05P10000) | Δ | O | O | ||||
| NURBS Interpolation Ability | Δ | O | O | ||||
| Tool Management |
Auto Tool Setting | O | O | O | |||
| Auto Tool Management | O | O | O | ||||
| Tool Life Management | O | O | O | ||||
| Accessibility | Machine Lock (R bit) | O | O | O | |||
| Software Limit | O | O | O | ||||
| Spindle Speed Arrival Check | O | O | O | ||||
| Axis Synchronize Feature | O | O | O | ||||
| Dynamic Axis Synchronize Feature | O | O | O | ||||
| Dynamic Axis Synchronize Feature | O | O | O | ||||
| Rapid Retraction for Rigid Tapping | O | O | O | ||||
| Virtual Axis Feature | O | O | O | ||||
| Axis Change Feature | O | O | O | ||||
| Axial Torque Limit | O | O | O | ||||
| Serial Bus Setting Feature(CNC Axis) | O | O | O | ||||
| Driver Information Display(CNC Axis) | O | O | O | ||||
| Spindle Application Feature(CNC Axis) | O | O | O | ||||
| Serial Bus PLC Axis | O | O | O | ||||
| ROT Element | O | O | O | ||||
| Dipole Front and Back System | O | O | O | ||||
| Data Backup Recovery | O | O | O | ||||
| Customized Opening Screen | O | O | O | ||||
| My Favorites (Only Eight key system supports) | O ─ |
O | O | ||||
| Project Protection Feature | O | O | O | ||||
| Limit Access Manager | O | O | O | ||||
| Remote AP Monitor | O | O | O | ||||
| Edit | Background Edit | O | O | O | |||
| Edit Protection | O | O | O | ||||
| Immediate Grammar Check | O | O | O | ||||
| PLC | PLC Diagnosis Feature(FORCE I Point) | O | O | O | |||
| Data Transfer | NETWORK | O | O | O | |||
| FTP | O | O | O | ||||
| RS-485 | O | O | O | ||||
| DNC(Network) | O | O | O | ||||
| DNC(USB) | O | O | O | ||||
| Information Display | Operation CV Display | O | O | O | |||
| Graphic Simulation | O | O | O | ||||
| Partial Graphic Simulation | O | O | O | ||||
| Dynamic Multi-Language Switch | O | O | O | ||||
| Inclined Plane | Feature Coordinate(Inclined Plane Process G68.2, G68.3) | Δ | Δ | Δ | |||
| Feature Coordinate Teach | Δ | Δ | Δ | ||||
| 5 axis feature | 5 Axis RTCP (G43.4) | Δ | Δ | Δ | |||
| Smooth TCP | Δ | Δ | Δ | ||||
| G code command | High Precision Locus Control Mode (G05P10000) | Δ | O | O | |||
| Smoothing Path Mode (G05.1) | O | O | O | ||||
| NURBS Interpolation (G06.2) | Δ | O | O | ||||
| Thread Cutting (G33) | O | O | O | ||||
| Auto Tool Measurement (G37) | O | O | O | ||||
| Tool of Offsets (G45~G48) | O | O | O | ||||
| High Speed Peck Drilling Cycle (G73) | O | O | O | ||||
| Left Handed Tapping (G74) | O | O | O | ||||
| High Precision Boring Cycle (G76) | O | O | O | ||||
| Drilling cycling (G81) | O | O | O | ||||
| Chopping (G81.1) | O | O | O | ||||
| Bottom Feed Hold Drilling Cycle (G82) | O | O | O | ||||
| Peck Drilling Cycle (G83) | O | O | O | ||||
| Tapping Cycle (G84) | O | O | O | ||||
| Boring Cycle (G85) | O | O | O | ||||
| High Speed Boring Cycle (G86) | O | O | O | ||||
| Back Boring Cycle (G87) | O | O | O | ||||
| Semi Automatic Finishing Boring Cycle (G88) | O | O | O | ||||
| Bottom Feed Hold Boring Cycle (G89) | O | O | O | ||||
| Multi-Group HSHP Parameter (G120.1) | O | O | O | ||||
| Option | Option-4 Enable Plugin Function | O | O | O | |||
| Option-11 High Precision Contour Control (HPCC) | Δ | O | O | ||||
| Option-12 Rotation Tool Center Point (RTCP) | Δ | Δ | Δ | ||||
| Option-13 Feature Coordinate System | Δ | Δ | Δ | ||||
| Option-14 Parameter learning function | |||||||
| Option-15 Tapping Learning | |||||||
| Option-16Syntec Vision | Δ | Δ | Δ | ||||
| Option-17 Commercial Vision Software | Δ | Δ | Δ | ||||
| Option-18 CAD/CAM | Δ | Δ | Δ | ||||
| Option-19 3D Arc Interpolation | Δ | Δ | Δ | ||||
| Option-20 Pick and Place (All in one) | Δ | Δ | Δ | ||||
| Option-21 Four Axis Robot | |||||||
| Option-22 Five Axis Robot | |||||||
| Option-23 Six Axis Robot | |||||||
| Option-24 Gantry Robot | |||||||
| Option-25 Advanced Look-Ahead | |||||||
| Option-26 Smooth Tool Center Point(STCP) | |||||||
| Option-27 Multiple mechanisms for five-axis | |||||||
| Option-28 The 2nd coordinate supports feature coordinate system | |||||||
| Option-29 Four-axis Rotation Tool Center Point Control (4AXRTCP) | |||||||
| Option-31 High Speed Chamfering Contour Control | |||||||
| Option-32 ROT Servo Turret | |||||||
| Option-34 Wood Software | |||||||
| Option-35 3D Laser Scanning | |||||||
| Option-36 Wood Built-In CAM Function | |||||||
* Only sell in Mainland China
** Only sell in Taiwan
*** VGA is only provided in the rear half
O Standard function
△ Optional function
– Not available function
| Category | Items | Multi-Function Milling | ||||
| 11MA | 11MB | 21MA | 21MA-E | 22MA | ||
| Product Specification | Max. PLC Controlled Paths | 2 | 2 | 2 | 2 | |
| Max. PLC Controlled Paths | 1 | 1 | 1 | 1 | ||
| Standard Axis | 4 | 8 | 6 | 6 | 6 | |
| Max. Axis (Optional) | 4 | 8 | 6 | 6 | 6 | |
| Max. Spindle | 2 | 4 | 4 | 4 | 4 | |
| Max. Simultaneous Axis Control | 4 | 4 | 4 | 4 | ||
| Min. Control (mm) | 0,0001 | 0,0001 | 0,0001 | 0,0001 | ||
| Max. number of program coordinate | 100 | 100 | 100 | 100 | ||
| Max. Number of Table Tools | 96 | 96 | 96 | 96 | ||
| Multi-Channel Function Group | 4 | 4 | 4 | 4 | ||
| Look-Ahead Blocks no. | 1000 | 2000 | 2000 | 2000 | ||
| Block Processing timT | 2500 | 2500 | 2500 | 2500 | ||
| Hardware Specifications | Storage DISKA (MB) | 512 | 512 | 512 | 4069 | |
| Standard I/O | 32/32 | 64/64 | 32/32 | 32/32 | 32/32 | |
| Optional I/O | ─ | 128/128 | 96/96 | 96/96 | ||
| DA | 2 | 2 | 2 | |||
| Monitor (Inch) | 10,4 | 8/10.4/15 | 8/10.4/15 | |||
| CF Card | ─ | ─ | ─ | |||
| CF Card | 2 | 2 | 2 | |||
| USB | ─ | ─ | ─ | |||
| RJ-45 | 1 | 1 | 1 | |||
| VGA Output | 1*** | ─ | ─ | |||
| PS/2 | ─ | ─ | ─ | |||
| RS-232 | ─ | ─ | ─ | |||
| RS-422 | ─ | ─ | ─ | |||
| RS-485 | 1 | 1 | 1 | |||
| USB | ─ | ─ | ─ | |||
| SRI | ─ | |||||
| Servo Control | Pulse Train (A/B Phase) | O | ─ | ─ | ||
| Pulse Train (CW/CCW) | O | ─ | ─ | |||
| Mechatrolink II | ─ | O | ─ | ─ | ||
| Mechatrolink III | ─ | ─ | O | O | ||
| EtherCAT | ─ | ─ | O | O | ||
| RTEX | ─ | ─ | O | O | ||
| Compensation | Backlash Compensation | O | O | O | O | |
| Pitch Error Compensation | O | O | O | O | ||
| Angular Error Compensation | O | O | O | O | ||
| Temperature Error Compensation | O | O | O | O | ||
| 2 Dimension Error Compensation | O | O | O | O | ||
| Operation | MPG Simulation | O | O | O | O | |
| Dry Run | O | O | O | O | ||
| Optional Stop | O | O | O | O | ||
| Single Block | O | O | O | O | ||
| Virtual MPG | O | O | O | O | ||
| Restart at Feedhold | O | O | O | O | ||
| Restart at Break Point | O | O | O | O | ||
| Tool Return | O | O | O | O | ||
| Fixture Offsets | O | O | O | O | ||
| MPG Offsets | O | O | O | O | ||
| Programming | Optional Skip | O | O | O | O | |
| B-Stop | O | O | O | O | ||
| Absolute Zero Point Coordinate (G92/G92.1) | O | O | O | O | ||
| Interrupt Macro (M96/M97) | ─ | O | O | O | ||
| M198 call Subroutines | ─ | O | O | O | ||
| Expandable G Code | O | O | O | O | ||
| HSHP | Constant Jerk Control | O | O | O | O | |
| Multiblocks S-curve motion plan | O | O | O | O | ||
| Auto declaration in Corner | O | O | O | O | ||
| Speed Limit for Round Radius | O | O | O | O | ||
| Multiple Sets of HSHP Parameters | O | O | O | O | ||
| Quick Parameter Setup | O | O | O | O | ||
| SPA Feature | O | O | O | O | ||
| Virtual Radius Funciton (for Rotary Axis) | ─ | O | O | O | ||
| HSHP Control Mode I (G05.1 Q1) | O | O | O | O | ||
| HSHP Control Mode II (G05P10000) | O | O | O | O | ||
| NURBS Interpolation Ability | O | O | O | O | ||
| Tool Management |
Auto Tool Setting | O | O | O | O | |
| Auto Tool Management | O | O | O | O | ||
| Tool Life Management | O | O | O | O | ||
| Accessibility | Machine Lock (R bit) | O | O | O | O | |
| Software Limit | O | O | O | O | ||
| Spindle Speed Arrival Check | O | O | O | O | ||
| Axis Synchronize Feature | O | O | O | O | ||
| Dynamic Axis Synchronize Feature | O | O | O | O | ||
| Dynamic Axis Synchronize Feature | O | O | O | O | ||
| Rapid Retraction for Rigid Tapping | O | O | O | O | ||
| Virtual Axis Feature | O | O | O | O | ||
| Axis Change Feature | O | O | O | O | ||
| Axial Torque Limit | ─ | O | O | O | ||
| Serial Bus Setting Feature(CNC Axis) | ─ | O | O | O | ||
| Driver Information Display(CNC Axis) | ─ | O | O | O | ||
| Spindle Application Feature(CNC Axis) | ─ | O | O | O | ||
| Serial Bus PLC Axis | ─ | O | O | O | ||
| ROT Element | ─ | O | O | O | ||
| Dipole Front and Back System | O | O | O | O | ||
| Data Backup Recovery | O | O | O | O | ||
| Customized Opening Screen | O | O | O | O | ||
| My Favorites (Only Eight key system supports) | O | O | O | O | ||
| Project Protection Feature | O | O | O | O | ||
| Limit Access Manager | O | O | O | O | ||
| Remote AP Monitor | O | O | O | O | ||
| Edit | Background Edit | O | O | O | O | |
| Edit Protection | O | O | O | O | ||
| Immediate Grammar Check | O | O | O | O | ||
| PLC | PLC Diagnosis Feature(FORCE I Point) | O | O | O | O | |
| Data Transfer | NETWORK | O | O | O | O | |
| FTP | O | O | O | O | ||
| RS-485 | O | O | O | O | ||
| DNC(Network) | O | O | O | O | ||
| DNC(USB) | O | O | O | O | ||
| Information Display | Operation CV Display | O | O | O | O | |
| Graphic Simulation | O | O | O | O | ||
| Partial Graphic Simulation | ─ | O | O | O | ||
| Dynamic Multi-Language Switch | O | O | O | O | ||
| Inclined Plane | Feature Coordinate(Inclined Plane Process G68.2, G68.3) | ─ | Δ | Δ | Δ | |
| Feature Coordinate Teach | ─ | Δ | Δ | Δ | ||
| 5 axis feature | 5 Axis RTCP (G43.4) | ─ | ─ | ─ | ─ | |
| Smooth TCP | ─ | ─ | ─ | ─ | ||
| G code command | High Precision Locus Control Mode (G05P10000) | O | O | O | O | |
| Smoothing Path Mode (G05.1) | O | O | O | O | ||
| NURBS Interpolation (G06.2) | O | O | O | |||
| Thread Cutting (G33) | O | O | O | O | ||
| Auto Tool Measurement (G37) | O | O | O | O | ||
| Tool of Offsets (G45~G48) | O | O | O | O | ||
| High Speed Peck Drilling Cycle (G73) | O | O | O | O | ||
| Left Handed Tapping (G74) | O | O | O | O | ||
| High Precision Boring Cycle (G76) | O | O | O | O | ||
| Drilling cycling (G81) | O | O | O | O | ||
| Chopping (G81.1) | O | O | O | O | ||
| Bottom Feed Hold Drilling Cycle (G82) | O | O | O | O | ||
| Peck Drilling Cycle (G83) | O | O | O | O | ||
| Tapping Cycle (G84) | O | O | O | O | ||
| Boring Cycle (G85) | O | O | O | O | ||
| High Speed Boring Cycle (G86) | O | O | O | O | ||
| Back Boring Cycle (G87) | O | O | O | O | ||
| Semi Automatic Finishing Boring Cycle (G88) | O | O | O | O | ||
| Bottom Feed Hold Boring Cycle (G89) | O | O | O | O | ||
| Multi-Group HSHP Parameter (G120.1) | O | O | O | O | ||
| Option | Option-4 Enable Plugin Function | O | O | O | ||
| Option-11 High Precision Contour Control (HPCC) | O | O | O | |||
| Option-12 Rotation Tool Center Point (RTCP) | ||||||
| Option-13 Feature Coordinate System | Δ | Δ | Δ | |||
| Option-14 Parameter learning function | Δ | |||||
| Option-15 Tapping Learning | Δ | |||||
| Option-16Syntec Vision | Δ | Δ | Δ | |||
| Option-17 Commercial Vision Software | Δ | Δ | Δ | |||
| Option-18 CAD/CAM | Δ | Δ | Δ | |||
| Option-19 3D Arc Interpolation | Δ | Δ | ||||
| Option-20 Pick and Place (All in one) | Δ | Δ | Δ | |||
| Option-21 Four Axis Robot | Δ | |||||
| Option-22 Five Axis Robot | Δ | |||||
| Option-23 Six Axis Robot | Δ | |||||
| Option-24 Gantry Robot | Δ | |||||
| Option-25 Advanced Look-Ahead | Δ | |||||
| Option-26 Smooth Tool Center Point(STCP) | ||||||
| Option-27 Multiple mechanisms for five-axis | Δ | |||||
| Option-28 The 2nd coordinate supports feature coordinate system | Δ | |||||
| Option-29 Four-axis Rotation Tool Center Point Control (4AXRTCP) | ||||||
| Option-31 High Speed Chamfering Contour Control | ||||||
| Option-32 ROT Servo Turret | Δ | |||||
| Option-34 Wood Software | ||||||
| Option-35 3D Laser Scanning | ||||||
| Option-36 Wood Built-In CAM Function | ||||||
* Only sell in Mainland China
** Only sell in Taiwan
*** VGA is only provided in the rear half
O Standard function
△ Optional function
– Not available function
| Loại | LRA1460-13 | |
| Số trục | 6 | |
| Tải trọng (kg) | 13kg | |
| Tầm với lớn nhất (mm) | 1460 | |
| Độ chính xác lặp lại (mm) | ±0.03 | |
| Phạm vi các khớp (°) | J1 | ±180 |
| J2 | +138/-105 | |
| J3 | +69/-225 | |
| J4 | ±200 | |
| J5 | ±125 | |
| J6 | ±360 | |
| Công suất động cơ (kw) | J1 | 1.5 |
| J2 | 1.5 | |
| J3 | 0.75 | |
| J4 | 0.2 | |
| J5 | 0.2 | |
| J6 | 0.2 | |
| Tốc độ lớn nhất*(°/s) | J1 | 265 |
| J2 | 250 | |
| J3 | 265 | |
| J4 | 475 | |
| J5 | 475 | |
| J6 | 730 | |
| Trọng lượng Robot (kg) | ≈170 | |
| Kiểu lắp đặt | Gắn sàn, Treo ngược | |
| Cấp bảo vệ | IP67 | |
| Điều kiện hoạt động | Nhiệt độ môi trường: 0~45℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
|
| Phần cứng | Bộ điều khiển : Syntec
Driver : Syntec Động cơ servo : Sanyo (Nhật Bản) Hộp số : Nabtesco (Nhật Bản) |
|
 |
 |
| Phạm vi hoạt động | Kích thước chân đế |
 |
|
| Kích thước mặt bích |
Đặc trưng
Ứng dụng
 |
 |
 |
| Lắp ráp | Cấp dỡ phôi | Mài/đánh bóng |
 |
 |
|
| Hàn | Khác |
| Loại | LRA1725-20 | |
| Số trục | 6 | |
| Tải trọng (kg) | 20kg | |
| Tầm với lớn nhất (mm) | 1725 | |
| Độ chính xác lặp lại (mm) | ±0.04 | |
| Phạm vi các khớp (°) | J1 | ±180 |
| J2 | +155/-105 | |
| J3 | +73/-240 | |
| J4 | ±270 | |
| J5 | ±145 | |
| J6 | ±360 | |
| Công suất động cơ (kw) | J1 | 2.0 |
| J2 | 2.0 | |
| J3 | 0.675 | |
| J4 | 0.2 | |
| J5 | 0.2 | |
| J6 | 0.2 | |
| Tốc độ lớn nhất*(°/s) | J1 | 190 |
| J2 | 205 | |
| J3 | 210 | |
| J4 | 400 | |
| J5 | 360 | |
| J6 | 610 | |
| Trọng lượng Robot (kg) | ≈230 | |
| Kiểu lắp đặt | Gắn sàn, Treo ngược | |
| Cấp bảo vệ | Khớp xoay: IP67 Chân đế: IP65 | |
| Điều kiện hoạt động | Nhiệt độ môi trường: 0~45℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) Gia tốc rung: 4,9 m/s2(0,5G) trở xuống |
|
| Phần cứng | Bộ điều khiển : Syntec
Driver : Syntec Động cơ servo : Sanyo (Nhật Bản) Hộp số : Nabtesco (Nhật Bản) |
|
 |
 |
| Phạm vi hoạt động | Kích thước chân đế |
 |
|
| Biểu đồ tải trọng | Kích thước mặt bích |
Đặc trưng
Ứng dụng
|
|
|
| Lắp ráp | Cấp dỡ phôi | Mài/đánh bóng |
|
|
|
| Hàn | Khác |
| Loại | LRA2100-60-6A-C | |
| Số trục | 6 | |
| Tải trọng (kg) | 60kg | |
| Tầm với lớn nhất (mm) | 2100 | |
| Độ chính xác lặp lại (mm) | ±0.2 | |
| Phạm vi các khớp (°) | J1 | ±170 |
| J2 | +135/-90 | |
| J3 | +75/-135 | |
| J4 | ±170 | |
| J5 | ±120 | |
| J6 | ±360 | |
| Công suất động cơ (kw) | J1 | 3.0 |
| J2 | 4.5 | |
| J3 | 3.0 | |
| J4 | 1.5 | |
| J5 | 0.75 | |
| J6 | 0.75 | |
| Tốc độ lớn nhất*(°/s) | J1 | 132 |
| J2 | 104 | |
| J3 | 104 | |
| J4 | 237 | |
| J5 | 171 | |
| J6 | 171 | |
| Trọng lượng Robot (kg) | 780 | |
| Kiểu lắp đặt | Gắn sàn | |
| Cấp bảo vệ | IP54 | |
| Điều kiện hoạt động | Nhiệt độ môi trường: 0~40℃
Độ ẩm môi trường xung quanh: Thông thường từ 75 %RH trở xuống (Không cho phép sương) Ngắn hạn 90 %RH trở xuống (trong vòng một tháng) |
|
 |
 |
| Phạm vi hoạt động | Kích thước mặt bích/ chân đế |
 |
|
| Biểu đồ tải trọng |
Đặc trưng
Ứng dụng
 |
 |
| Cầm nắm | Cấp dỡ phôi |
|
|
| Lắp ráp | Khác |

















-背-1-1-300x300.jpg)



